TomoID: A Scalable Approach to Device Free Indoor Localization via RFID Tomography
Yang-Hsi Su, Jingliang Ren, Zi Qian, David Fouhey, and Alanson Sample
Abstract
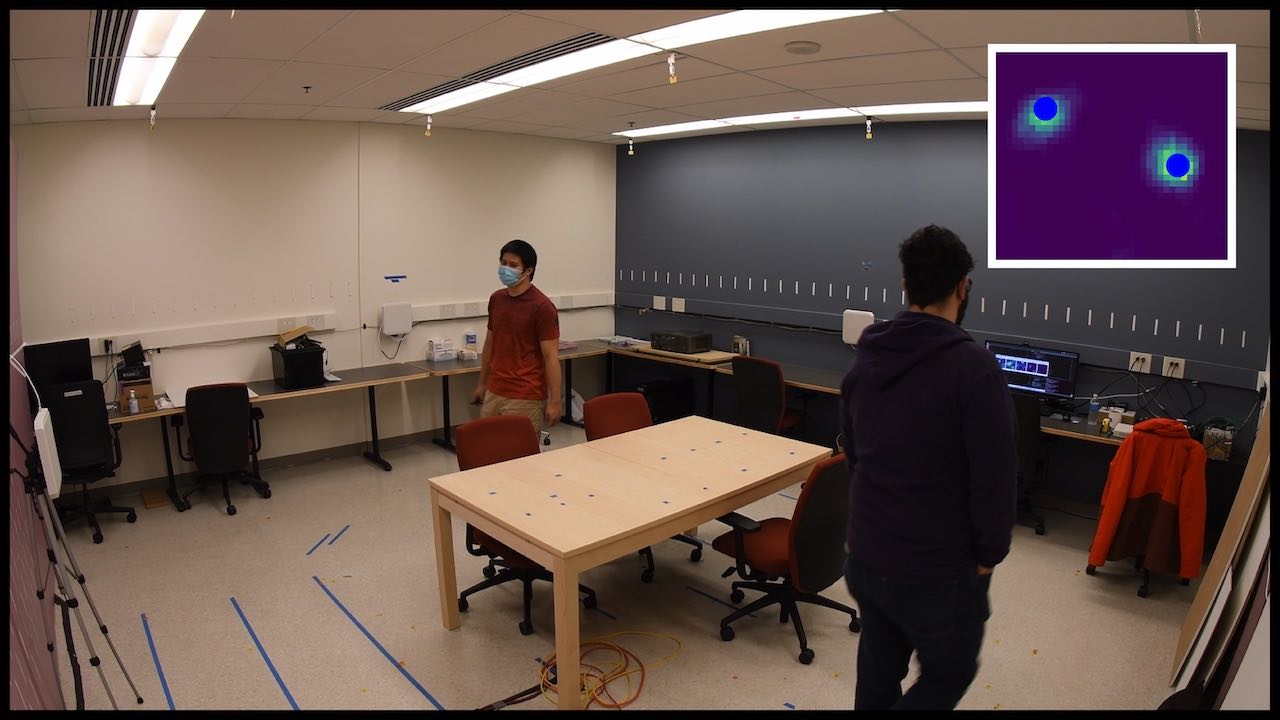
Device-free localization methods allow users to benefit from location-aware services without the need to carry a transponder. However, conventional radio sensing approaches using active wireless devices require wired power or continual battery maintenance, limiting deployability. We present TomoID, a real-time multi-user UHF RFID tomographic localization system that uses low-level communication channel parameters such as RSSI, RF Phase, and Read Rate, to create probability heatmaps of users’ locations. The heatmaps are passed to our custom-designed signal processing and machine learning pipeline to robustly predict users’ locations. Results show that TomoID is highly accurate, with an average mean error of 17.1 cm for a stationary user and 18.9 cm when users are walking. With multi-user tracking, results showing an average mean error of <72 cm for five individuals in constant motion. Importantly, TomoID is specifically designed to work in real-world multipath-rich indoor environments. Our signal processing and machine learning pipeline allows a pre-trained localization model to be applied to new environments of different shapes and sizes, while maintaining good accuracy sufficient for indoor user localization and tracking. Ultimately, TomoID enables a scalable, easily deployable, and minimally intrusive method for locating uninstrumented users in indoor environments.